Riepilogo: Yueqing Technology ha pubblicato un white paper sulla programmazione della tecnologia di simulazione e lavorazione laser, che descrive le difficoltà del controllo ad alta precisione dell’applicazione della tecnologia di lavorazione laser e analizza ulteriormente la traiettoria e lo schema di simulazione della lavorazione laser, come utilizzare in modo efficace iRobotCAM per completare la lavorazione e la simulazione laser e migliorare notevolmente lo sviluppo delle apparecchiature per scenari applicativi di lavorazione laser e l’efficienza delle applicazioni di lavorazione laser.
- Panoramica del settore laser
L’industria laser ha un’enorme portata occupazionale e un mercato di dimensioni future, e sta attraversando una fase di rapido sviluppo.
- Caratteristiche della tecnologia laser
La principale caratteristica di processo del laser è l’elevata precisione. Per comprendere meglio l’applicazione della tecnologia laser, partiamo dal contesto delle apparecchiature e consideriamo lo sviluppo e l’applicazione di macchine utensili laser e applicazioni robotiche di lavorazione laser come applicazioni tipiche, per analizzarne ulteriormente le difficoltà e illustrarne le soluzioni.
- Sviluppo e applicazione di macchine utensili laser
Partendo dal processo di sviluppo delle attrezzature delle macchine utensili laser, possiamo comprendere meglio le difficoltà applicative e le soluzioni della tecnologia laser sulle macchine utensili.
Processo di sviluppo di macchine utensili laser: modellazione della struttura 3D < modellazione elettromeccanica e simulazione del movimento < generazione della traiettoria e debug virtuale < post-elaborazione e simulazione dell’elaborazione
Di seguito viene utilizzato iRobotCAM come soluzione software per lo sviluppo e il debug di macchine utensili laser per spiegare come implementare passo dopo passo lo sviluppo e il debug virtuale di macchine utensili laser e realizzare la produzione in serie e l’applicazione di macchine utensili laser.
1) Modellazione della struttura 3D: iRobotCAM sfrutta le caratteristiche della piattaforma CAD 3D per costruire rapidamente un modello digitale della struttura 3D della macchina utensile.
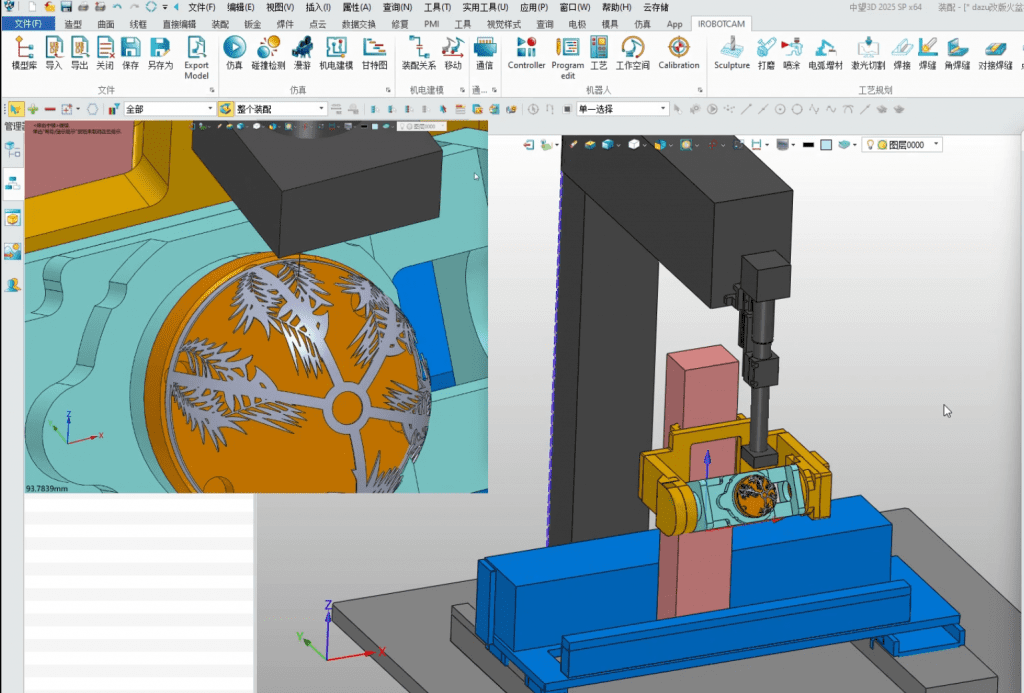
2) Modellazione elettromeccanica e simulazione del movimento: iRobotCAM dispone di un modulo di modellazione elettromeccanica che può essere utilizzato per la modellazione e la progettazione di linee di produzione e per il debug virtuale dei robot. Prima della produzione effettiva, il processo di lavorazione laser può essere simulato in un ambiente virtuale per individuare e risolvere in anticipo possibili problemi, come interferenze dovute a collisioni durante il movimento del robot, verifica della singolarità, della raggiungibilità e delle collisioni del robot, errori di percorso laser, ecc., al fine di ridurre errori e rischi nel debug effettivo e migliorare l’efficienza e la sicurezza della produzione.
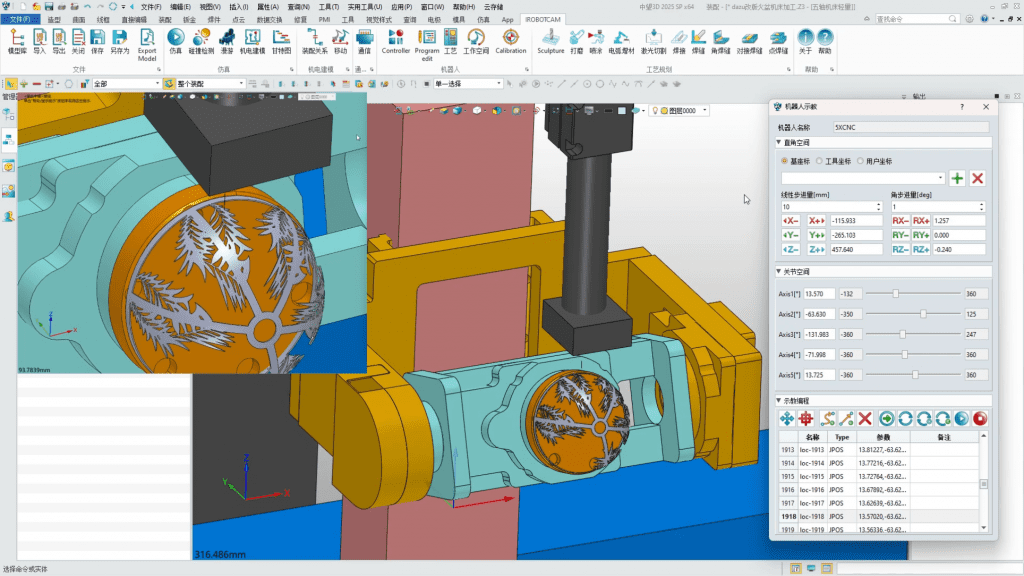
3) Generazione della traiettoria e debug virtuale: sviluppato sulla base della piattaforma ZW3D, può utilizzare i vari algoritmi di traiettoria da 2 a 5 assi di ZW3D, in modo che il robot abbia algoritmi di traiettoria precisi simili al software CAM durante il processo di elaborazione laser e possa focalizzare con precisione il raggio laser sulla parte in lavorazione, realizzando processi di taglio laser, saldatura, incisione e altri processi ad alta precisione, garantendo qualità e coerenza di elaborazione.
4). Post-elaborazione e simulazione della lavorazione: il pratico modulo di post-elaborazione di iRobotCAM può generare rapidamente codice e visualizzare in modo intuitivo gli effetti della simulazione della lavorazione
Diamo un’occhiata a come iRobotCAM utilizza macchine utensili a 5 assi per realizzare lavorazioni e simulazioni laser:
4. Applicazione della tecnologia laser robotica
La tecnologia laser robotica è principalmente ad alta precisione e la capacità di ottenere una produzione ad alta precisione utilizzando i laser è fondamentale per vari settori, come quello aerospaziale, automobilistico e meccanico, per realizzare apparecchiature ad alte prestazioni o ad alta precisione. Per quanto riguarda l’industria robotica, quali sono le difficoltà nell’applicazione della tecnologia laser? Come implementare rapidamente l’applicazione della tecnologia laser robotica?
Innanzitutto, per la tecnologia di lavorazione laser dei robot, il processo generale è il seguente:
Importazione robot e pezzo > Posizionamento del pezzo e calibrazione del robot > Realizzazione della programmazione della traiettoria > Simulazione dell’intera scena > Output del codice ed elaborazione del robot
Dal processo descritto sopra, si può osservare che l’obiettivo della tecnologia laser è la creazione di un ambiente digitale e l’output e la simulazione del codice. Prendiamo come esempio il software di programmazione offline iRobotCAM per spiegare come utilizzare iRobotCAM per ottenere un’applicazione efficiente della tecnologia laser robotica.
1) Utilizzando iRobotCAM, che si basa sulla capacità della piattaforma CAD 3D, la digitalizzazione delle attrezzature e dei processi può essere modellata rapidamente
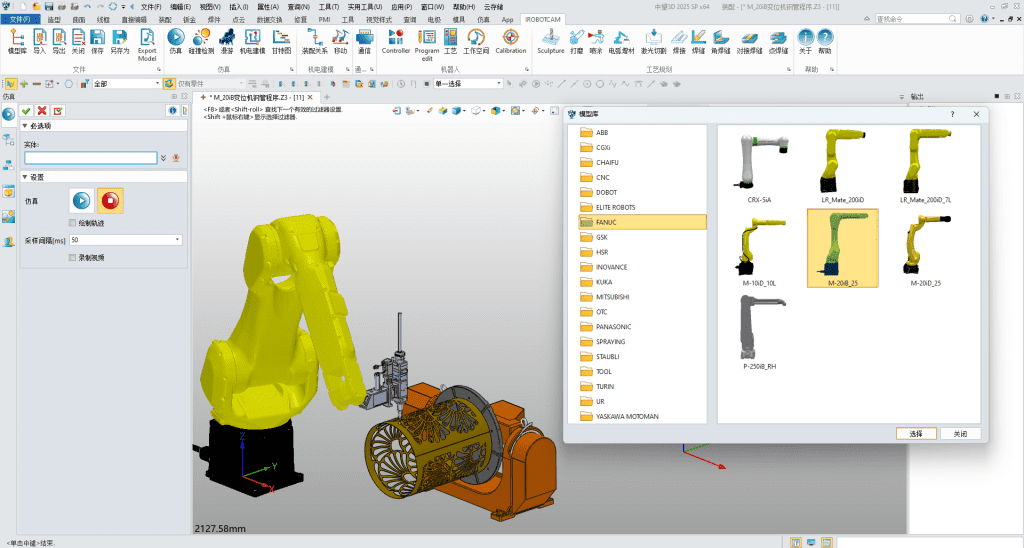
2) Utilizzando la libreria di macchine di iRobotCAM, è possibile costruire rapidamente robot o utensili correlati alle applicazioni laser, evitando la necessità di creare ripetutamente librerie di parti di base in futuro e aiutando le aziende a utilizzare i modelli digitali in modo più efficiente.
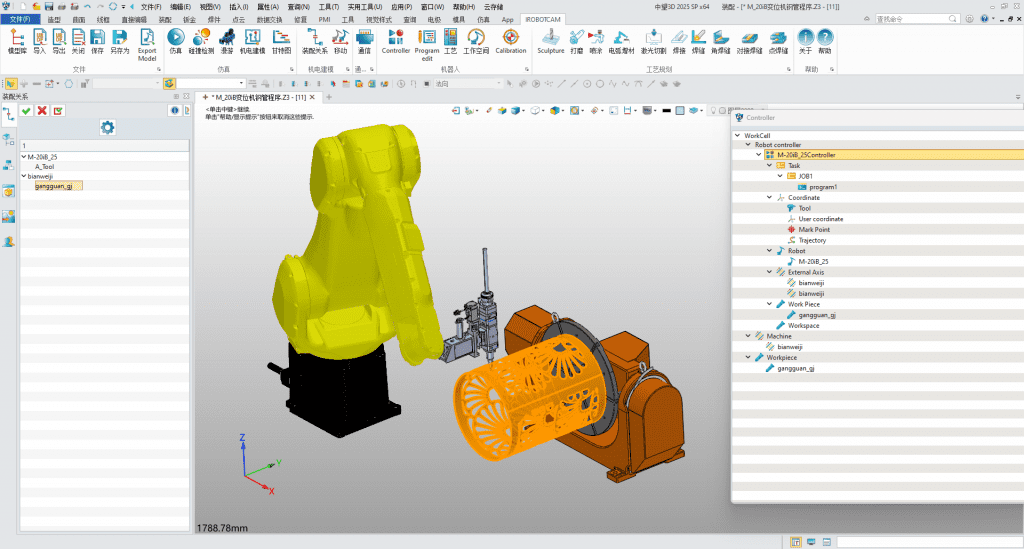
3). Utilizzando l’esclusiva funzione di posizionamento di iRobotCAM, il pezzo può essere posizionato in modo rapido e preciso in base alle esigenze di lavorazione laser. Più specificamente, iRobotCAM è in grado di posizionare il pezzo in diverse condizioni di lavoro, in base alle caratteristiche CAD del pezzo.
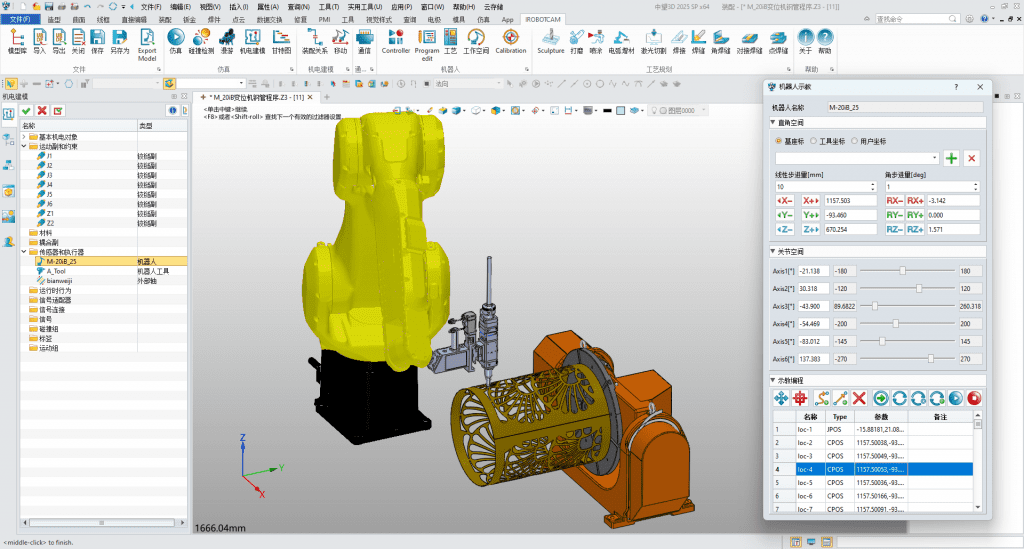
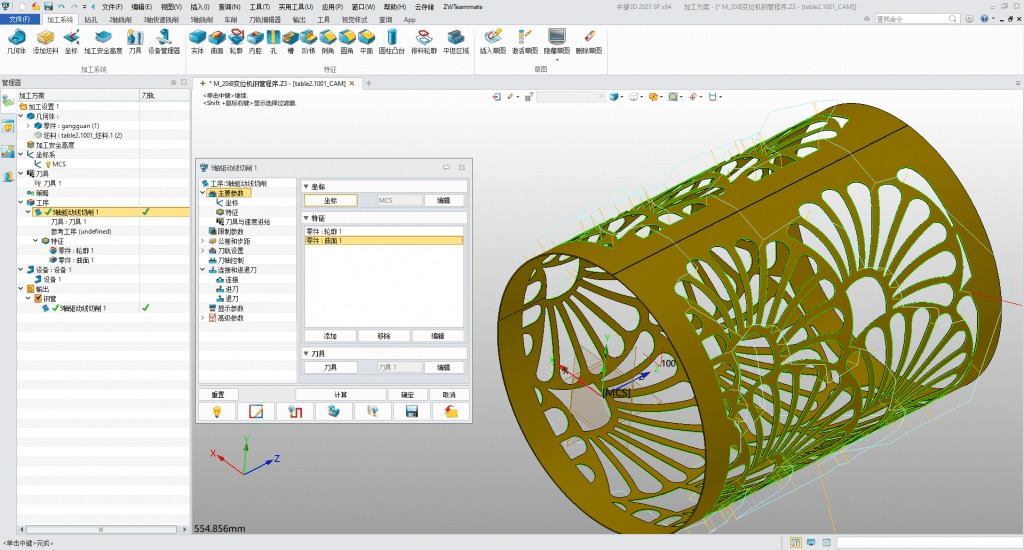
4) Utilizzando la capacità di generazione di traiettorie di iRobotCAM, è possibile generare traiettorie multiasse complesse su superfici curve e realizzare l’applicazione di processi laser per robot con più di 7 assi.
5). Le funzionalità di debug virtuale del robot di iRobotCAM possono essere utilizzate per realizzare la programmazione di scene laser del robot e la simulazione virtuale, e visualizzare in modo efficiente l’effetto applicativo della tecnologia robotica.
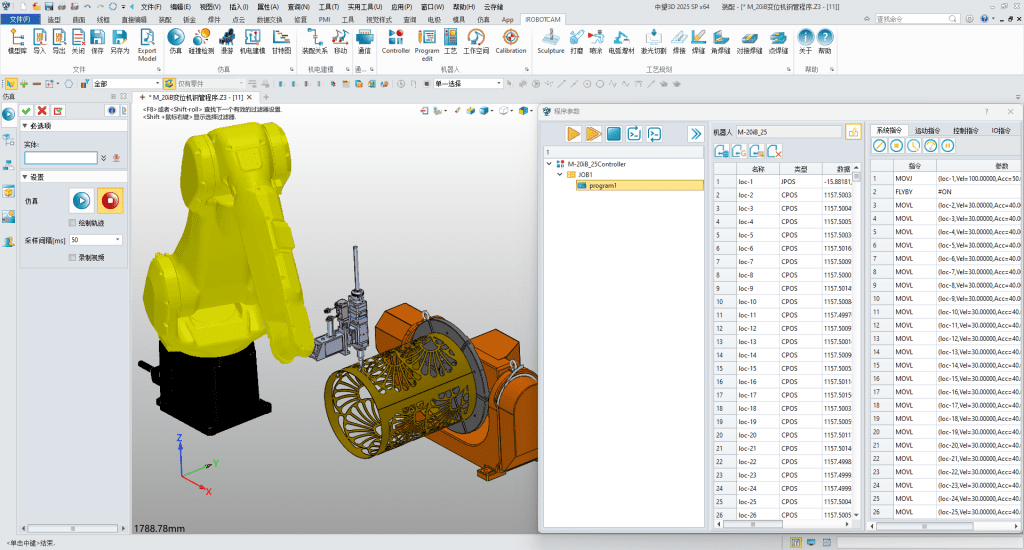
6. Utilizzando le funzionalità di post-elaborazione di iRobotCAM, è possibile adattarsi in modo efficiente a vari tipi di robot, tra cui FANUC, ABB, Yaskawa, KUKA, GSK, STEP, Estun, Turin, ecc. e utilizzare in modo efficiente un set di software per gestire più marchi o più dispositivi.
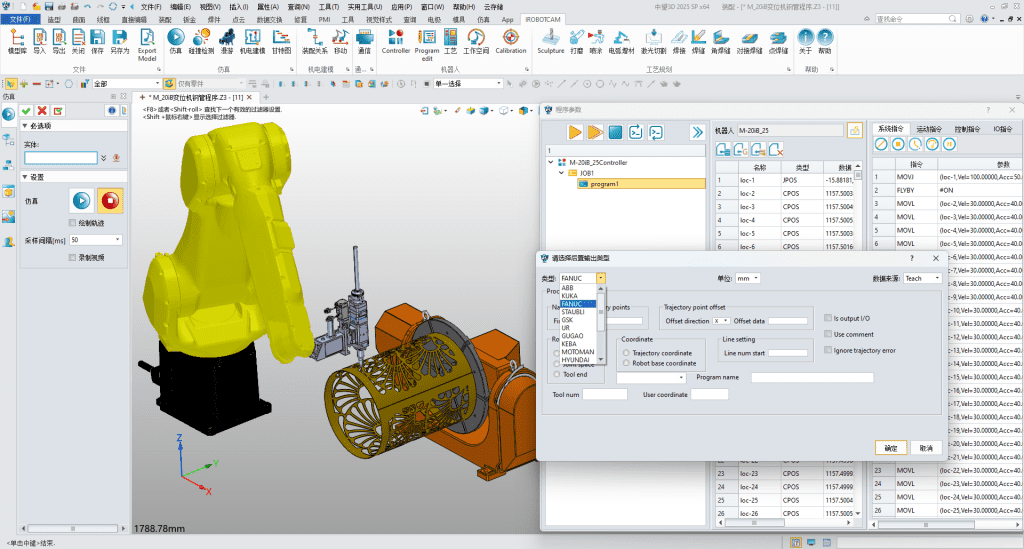
Ora, diamo un’occhiata a come iRobotCAM utilizza i robot per realizzare lavorazioni di modelli cavi a 5 assi. Grazie alle capacità di programmazione flessibili di iRobotCAM, è possibile generare traiettorie a 5 assi e simulare rapidamente il robot.
5. Riepilogo
Il punto centrale dell’applicazione della tecnologia laser è la precisione, che richiede programmazione e simulazione per un’architettura ad alta precisione. Attraverso i tipici casi applicativi di macchine per la lavorazione laser a 5 assi e gli scenari applicativi di lavorazione laser multiasse robotizzati sopra descritti, si può osservare come la scelta di iRobotCAM come soluzione per la lavorazione laser e il debug virtuale possa risolvere efficacemente il problema di alta precisione sottostante alla lavorazione laser. Inoltre, come applicazione di processo della lavorazione laser, iRobotCAM può espandere ulteriormente la sua applicazione in ulteriori scenari, tra cui taglio laser, deposizione laser, applicazioni di produzione additiva ad arco, ecc., grazie all’apertura della sua architettura tecnica e ai suoi evidenti vantaggi tecnici in termini di alta precisione.
Informazioni su Yueqing Technology
Yueqing Technology è impegnata a realizzare una piattaforma aperta di programmazione offline dei robot iRobotCAM, ovvero una soluzione digitale che integra la progettazione concettuale elettromeccanica delle linee di produzione, la simulazione della programmazione dell’elaborazione dei robot e il debug virtuale.
Sito web di iRobotCAM: www.iRobotCAM.com; Contatto: cooperation@iRobotCAM.com


