Abstract: Di fronte al problema dell’elevata soglia e degli elevati costi della piattaforma di modellazione e addestramento dei robot, Yueqing Technology sfrutta i vantaggi della propria tecnologia industriale nel software per robot per rilasciare il modulo di modellazione dei robot basato sul kernel di geometria 3D, espandere l’interfaccia URDF e aprire la simulazione e l’analisi dei robot ROS.
Di fronte al problema dell’elevata soglia e degli elevati costi della piattaforma di modellazione e addestramento dei robot, Yueqing Technology ha sfruttato i suoi vantaggi tecnici nel settore dei software per robot per rilasciare il modulo di modellazione dei robot iRobotCAM basato sulla piattaforma kernel di geometria 3D.
- Grazie alle capacità di modellazione di iRobotCAM e alle potenzialità del motore fisico sviluppato internamente, iRobotCAM è in grado di creare e gestire rapidamente modelli di robot ed eseguire simulazioni fisiche.
- Grazie alle interfacce estese di importazione ed esportazione URDF, iRobotCAM si collega ulteriormente ai robot ROS, consentendo agli utenti di collegare la modellazione e la simulazione dei robot per addestrare in modo più efficace il modello fisico dei robot.
Di seguito viene preso come esempio il robot industriale più semplice per spiegare meglio come utilizzare iRobotCAM per realizzare la modellazione e il modello di addestramento del robot:
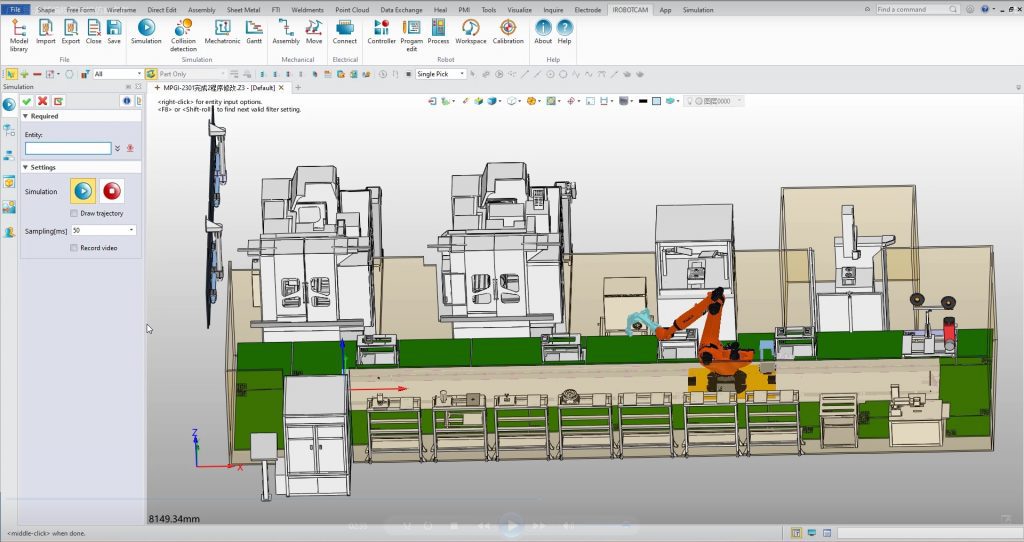
- Modellazione digitale di scene 3D
- Utilizzando la funzione di modellazione 3D, iRobotCAM può costruire modelli 3D complessi e completare la modellazione di scene digitali.
- Supporta l’importazione di formati IGES, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid e altri formati 3D, per riutilizzare i modelli 3D esistenti e migliorare l’efficienza della costruzione di scene digitali del robot.
- Biblioteca di progettazione meccatronica e robotica
- Creazione di un ambiente di dati dei sensori: supporto di sistemi di segnale PLC tra cui Siemens, Mitsubishi, Inovance e altri marchi e supporto della personalizzazione di più dispositivi di accesso al segnale
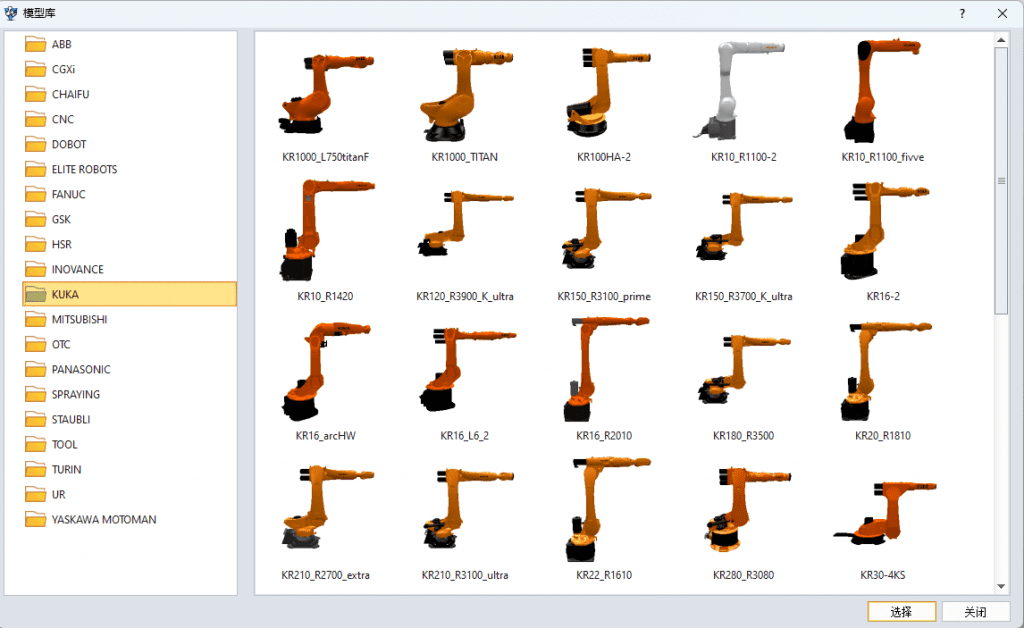
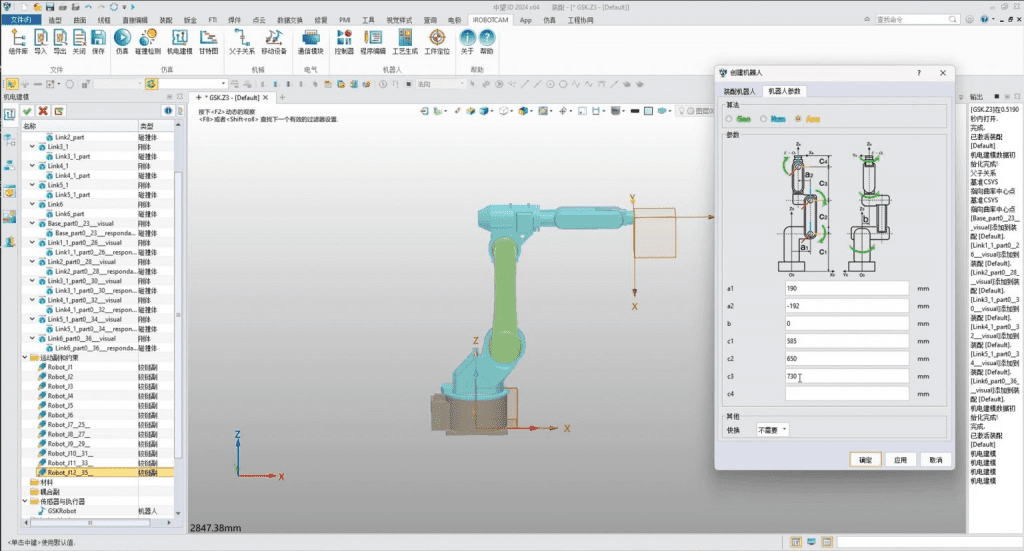
- Creazione di librerie robot: per i robot industriali, è possibile utilizzare le librerie robot integrate, tra cui ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO e Turing, per creare modelli di simulazione robot, oppure creare una propria libreria robot tramite funzioni di personalizzazione. Per i robot umanoidi o con ruote, è possibile definire le informazioni dettagliate sui giunti delle parti corrispondenti in base alle esigenze, e la definizione complessiva dei giunti, il rilevamento delle collisioni, ecc., possono essere elaborati per creare una libreria completa specifica per robot umanoidi o con ruote.
- Addestramento robotico
- Creazione di un modello di pianificazione della traiettoria del robot: supporto alla simulazione della comunicazione IO multi-macchina, alla sincronizzazione multi-robot e alla pianificazione del collegamento multi-asse del robot;
- Addestramento di modelli fisici addestrati da robot: supporta la simulazione di caratteristiche fisiche utilizzando il proprio motore fisico, compresi requisiti di evitamento degli ostacoli, analisi delle collisioni e altri modelli di dati, e supporta l’espansione di interfacce di terze parti per supportare gli algoritmi di addestramento dei robot in scenari specifici.
- Docking dei dati con robot ROS per ottenere un debug congiunto
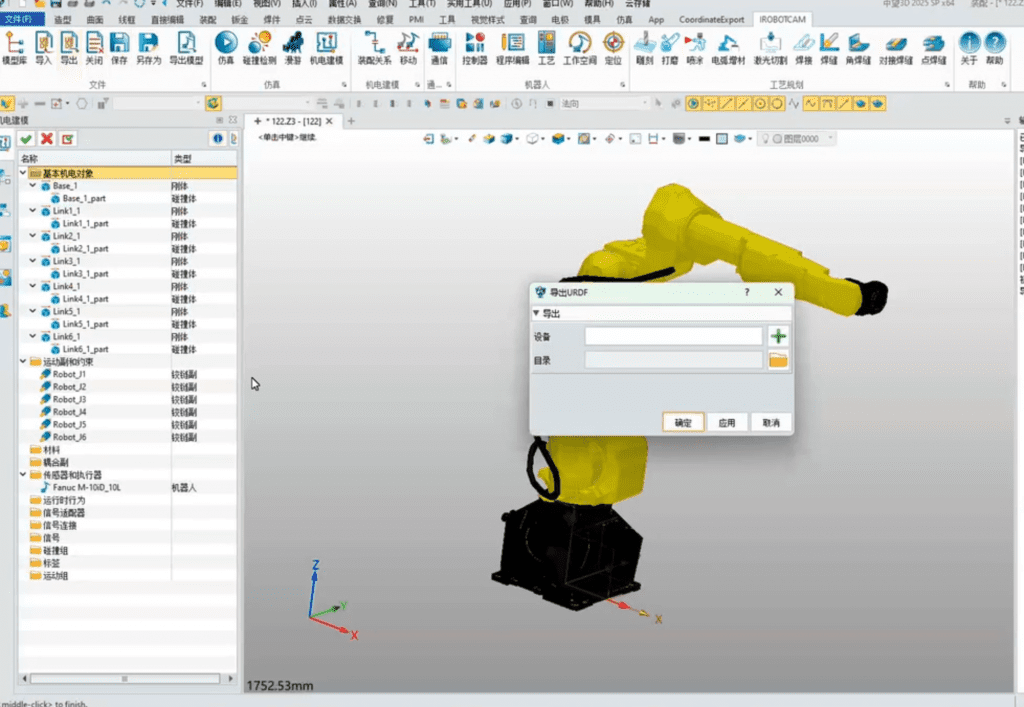
- Il modello di ottimizzazione del robot completato da iRobotCAM può essere esportato in URDF per ulteriori simulazioni ed esecuzioni di robot ROS
- Grazie alla funzione di importazione di URDF, il modello di base del robot può essere importato in iRobotCAM e l’ambiente dati del robot può essere ulteriormente modificato e addestrato su iRobotCAM per soddisfare gli obiettivi di progettazione del modello dati del robot.
Informazioni su Yueqing Technology
Yueqing Technology è impegnata a realizzare una piattaforma aperta di programmazione offline dei robot iRobotCAM, ovvero una soluzione digitale che integra la progettazione concettuale elettromeccanica delle linee di produzione, la simulazione della programmazione dell’elaborazione dei robot e il debug virtuale.
Sito web di iRobotCAM: www.iRobotCAM.com; Contatto: cooperation@iRobotCAM.com


