Résumé : Face au problème du seuil élevé et du coût élevé de la plateforme de modélisation et de formation des robots, Yueqing Technology exploite ses propres avantages technologiques industriels dans les logiciels de robot pour publier le module de modélisation de robot basé sur le noyau de géométrie 3D, étendre l’interface URDF et ouvrir la simulation et l’analyse des robots ROS.
Face au problème du seuil élevé et du coût élevé de la plateforme de modélisation et de formation des robots, Yueqing Technology a tiré parti de ses avantages techniques industriels en matière de logiciels de robot pour lancer le module de modélisation de robot iRobotCAM basé sur la plateforme de noyau de géométrie 3D.
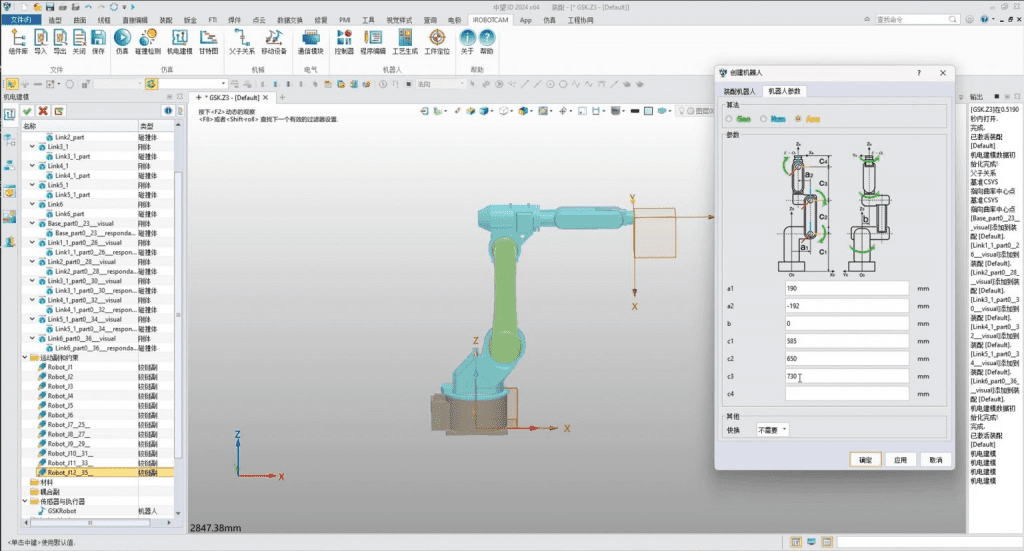
- Grâce aux capacités de modélisation d’iRobotCAM et aux capacités du moteur physique développé en interne, iRobotCAM peut rapidement créer et gérer des modèles de robots et effectuer des simulations physiques.
- Grâce aux interfaces d’importation et d’exportation URDF étendues, iRobotCAM se connecte davantage aux robots ROS, permettant aux utilisateurs de connecter la modélisation et la simulation de robots pour former plus efficacement le modèle physique des robots.
Ce qui suit prend le robot industriel le plus simple comme exemple pour expliquer plus en détail comment utiliser iRobotCAM pour réaliser la modélisation et la formation de robots :
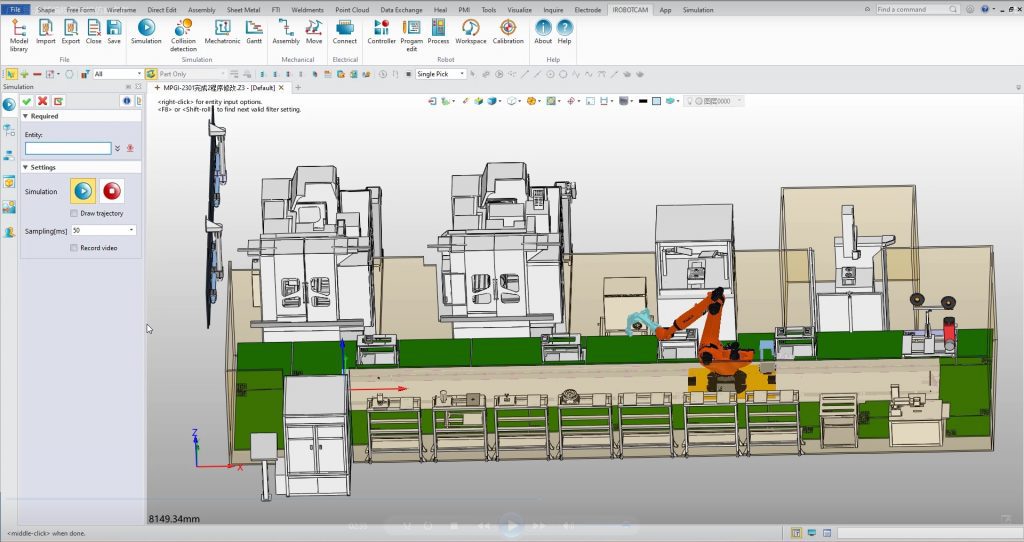
- Modélisation numérique de scènes 3D
- Grâce à la fonction de modélisation 3D, iRobotCAM peut créer des modèles 3D complexes et compléter la modélisation de scènes numériques.
- Prend en charge l’importation d’iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid et d’autres formats 3D, afin de réutiliser les modèles 3D existants, d’améliorer l’efficacité de la construction de scènes numériques de robots.
- Bibliothèque de conception mécatronique et de robotique
- Mise en place d’un environnement de données de capteurs : prise en charge des systèmes de signaux PLC, notamment Siemens, Mitsubishi, Inovance et d’autres marques, et prise en charge de la personnalisation de davantage de dispositifs d’accès aux signaux
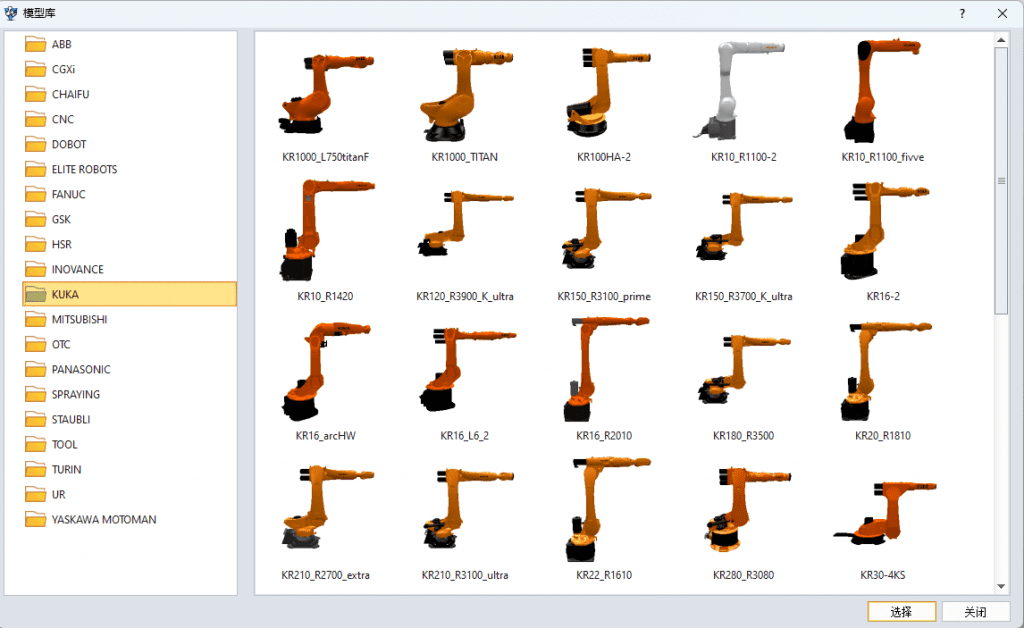
- Création d’une bibliothèque robotique : Pour les robots industriels, vous pouvez utiliser les bibliothèques robotiques embarquées d’ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO et Turing pour créer des modèles de simulation robotique, ou créer votre propre bibliothèque robotique grâce à des fonctions de personnalisation. Pour les robots humanoïdes ou à roues, les informations détaillées des articulations des pièces correspondantes peuvent être définies selon les besoins, et la définition globale des articulations, la détection des collisions, etc., peuvent être générées pour constituer une bibliothèque robotique complète spécifique aux robots humanoïdes ou à roues.
- Formation des robots
- Établissement d’un modèle de planification de trajectoire de robot : prise en charge de la simulation de communication IO multi-machines, de la synchronisation multi-robots et de la planification de liaison multi-axes de robots ;
- Formation de modèles physiques formés par des robots : il prend en charge la simulation de caractéristiques physiques en utilisant son propre moteur physique, y compris les exigences d’évitement d’obstacles, l’analyse des collisions et d’autres modèles de données, et prend en charge l’extension d’interfaces tierces pour prendre en charge les algorithmes de formation des robots dans des scénarios spécifiques.
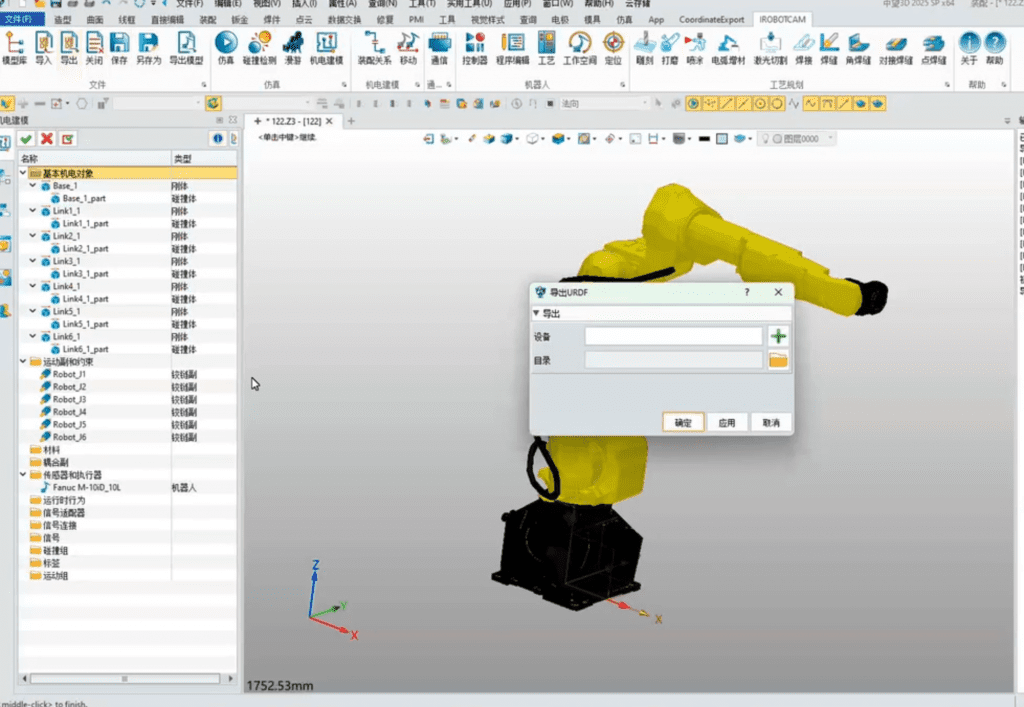
- Amarrage des données avec les robots ROS pour réaliser un débogage conjoint
- Le modèle d’optimisation du robot complété par iRobotCAM peut être exporté vers URDF pour une simulation et une exécution ultérieures des robots ROS
- Avec la fonction d’importation d’URDF, le modèle de base du robot peut être importé dans iRobotCAM, et l’environnement de données du robot peut être davantage modifié et formé sur iRobotCAM pour répondre aux objectifs de conception du modèle de données du robot.
À propos de Yueqing Technology
Yueqing Technology s’engage à construire une plate-forme de programmation hors ligne de robot iRobotCAM ouverte, qui est une solution numérique intégrant la conception conceptuelle électromécanique des lignes de production, la simulation de programmation de traitement de robot et le débogage virtuel.
Site Web d’iRobotCAM : www.iRobotCAM.com ; Contact : cooperation@iRobotCAM.com


