Résumé : La difficulté du traitement de revêtement laser robotisé pour le traitement de pièces complexes telles que des lames réside dans l’utilisation de caractéristiques de haute précision, et les avantages de l’architecture technique d’iRobotCAM basée sur le noyau de CAO 3D peuvent répondre efficacement aux exigences de haute précision, afin de réaliser un traitement de revêtement laser de haute précision de lames à cinq axes.
La conception et l’usinage des pales doivent être adaptés à des scénarios spécifiques en fonction des différents scénarios d’application, des petites pales de ventilateur aux pales d’aviation. Selon les différents scénarios d’application des produits industriels, les éléments de conception varient : certains exigent une esthétique, d’autres un silence, d’autres encore des performances. La réponse finale de la pale aux besoins dépend des besoins de chaque secteur, ainsi que des exigences des différentes méthodes de traitement. Le contrôle de la précision est essentiel, seule la précision est efficacement contrôlée. Il existe un moyen de répondre aux besoins de différents scénarios. Prenons l’exemple du revêtement laser robotisé des pales : iRobotCAM tire parti de son architecture CAO et présente les avantages d’une architecture haute précision. Comment l’appliquer efficacement au revêtement laser ?
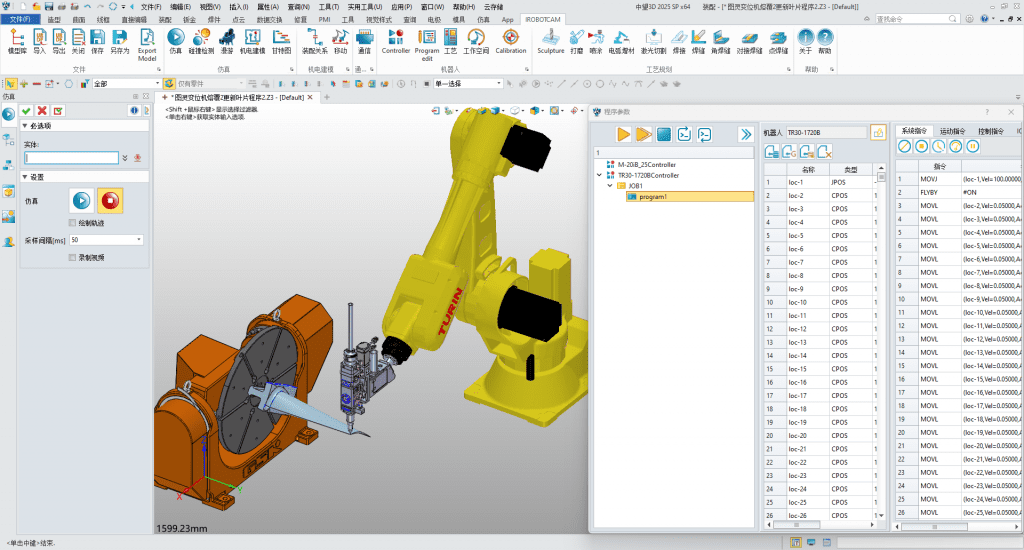
Pour les applications de traitement laser robotisé, le processus habituel est le suivant :
Importer un robot et une pièce > positionnement de la pièce et étalonnage du robot > réaliser une programmation de trajectoire > simulation de toutes les scènes > sortie de code et traitement du robot
- En utilisant les caractéristiques d’iRobotCAM basées sur la plate-forme CAO 3D et en regardant la 3D, vous pouvez rapidement établir un modèle numérique du scénario d’application du robot
- En utilisant le module électromécanique d’iRobotCAM et la bibliothèque de robots prédéfinis, vous pouvez définir des robots, des outils, etc. pertinents pour la scène du robot
- Selon les besoins du processus de traitement laser, diverses trajectoires de 2 à 5 axes sont générées pour répondre aux exigences de trajectoire de scénarios spécifiques
- Sur la base du moteur physique d’iRobotCAM, le mouvement du robot est simulé, calibré et le code d’exécution correspondant est généré.
Outre l’architecture technique, la facilité de programmation du logiciel robotique est l’élément le plus directement perçu par l’utilisateur, et l’expérience utilisateur est un indicateur clé. Franchement, l’évolution des logiciels industriels ne se fait pas en un jour. De l’architecture technique à l’expérience utilisateur, les logiciels industriels nationaux ont considérablement progressé ces dernières années. Forts de ces années d’expérience dans les logiciels étrangers, vous pouvez également essayer les logiciels industriels nationaux. Pour choisir un logiciel de programmation robotique hors ligne, essayez iRobotCAM.
En prenant comme exemple l’utilisation du robot Turin pour réaliser le traitement de revêtement laser des pales à cinq axes, comment iRobotCAM réalise-t-il facilement le traitement laser robotisé étape par étape ?
À propos de Yueqing Technology
Yueqing Technology s’engage à construire une plate-forme de programmation hors ligne de robot iRobotCAM ouverte, qui est une solution numérique intégrant la conception conceptuelle électromécanique des lignes de production, la simulation de programmation de traitement de robot et le débogage virtuel.
Site Web d’iRobotCAM : www.iRobotCAM.com, contact : cooperation@iRobotCAM.com


