摘要: 武汉需要智能与南京越擎科技达成合作,实现了机器人的数字孪生样机,展示机器人教学与机器人应用编程的关联性,直观的展示了机器人的应用场景。
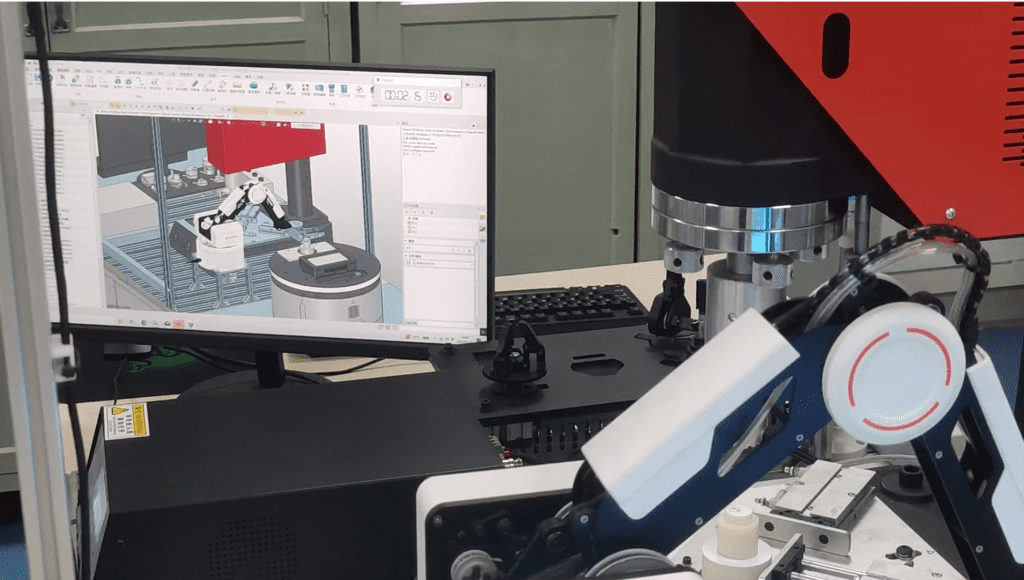
武汉需要智能与南京越擎科技达成合作,针对机器人的应用场景实现物理世界与虚拟世界的数字孪生,实现iRobotCAM机器人离线编程软件与需要智能的机器人的PLC通信,关节运动等的精准控制,用数字孪生的应用模式,展示机器人教学与机器人应用编程的关联性,直观的展示了机器人的应用场景。
对于数字孪生的应用,目前业界主要有两种不同的技术路线
- 以仿真效果为主打的虚拟现实路线,一般是Unity等游戏引擎作为基础技术,进一步的针对行业特性做开发,从而定制出所需的仿真应用效果。
- 以物理建模为基础,通过建立物理世界与虚拟世界的桥梁,从而实现现实与虚拟的互动,实现真正的数字孪生。
而从技术的应用上,以物理世界建模而形成的数字孪生世界,面对物理现实世界的关键要素的抽象模型的离散等要素,往往需要更多的研发投入,但对于工业应用而言,这种真正的数字孪生的架构的价值更高,可以将复杂的物理场景有效的呈现在虚拟世界的同时,也可以通过进一步的机器人虚拟调试进一步驱动物理世界的变更。
针对工业机器人的应用领域,从iRobotCAM机器人离线编程软件的技术选择来讲,iRobotCAM选择是以CAD数据为基础,实现物理世界而虚拟世界的互通,实现真正的数字孪生应用。而具体来讲,iRobotCAM工业机器人离线编程软件如何实现iRobotCAM便捷的虚拟编程环境的搭建
- 电机装配仿真,包含机器人,快换装置,输送线,多种传感器
- 虚实同步仿真,采集产线数据,实现将运动控制器数据,PLC数据映射到仿真系统
- 支持包含输送线,多机器人,物料系统的系统仿真支持包含输送线,多机器人,物料系统的系统仿真
而通过快速的搭建应用场景,并对接相应的通信模块,iRobotCAM即可实现机器人虚拟调试与数字孪生应用场景
关于越擎科技
越擎科技致力于打造开放的iRobotCAM全国产机器人离线编程软件平台,是集产线机电概念设计以及机器人加工编程仿真,虚拟调试等一体的数字化解决方案.
iRobotCAM网站: www.iRobotCAM.com,联络邮件: cooperation@iRobotCAM.com


