Progettazione di robot/progettazione di linee di produzione/programmazione offline/messa in servizio virtuale
Motore di simulazione fisica affidabile
Messa in servizio virtuale con più postazioni di lavoro
Architettura di integrazione dei processi aperti
Integrare rapidamente moduli di processo personalizzati
Progettazione e simulazione di robot
Supporta l’importazione di decine di formati di dati, tra cui Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid, ecc.;
Supporta la definizione del giunto del robot, il controllo del segnale, ecc.
Supporta l’importazione o l’esportazione URDF, supporta l’esportazione di parametri di giunto, inerzia e altri e facilita l’uso di sistemi robotici quali sistemi ROS o software di simulazione per l’addestramento;
iRobotCAM è dotato di un motore dinamico completo per garantire che l’URDF in uscita soddisfi i requisiti di simulazione di software come ROS.
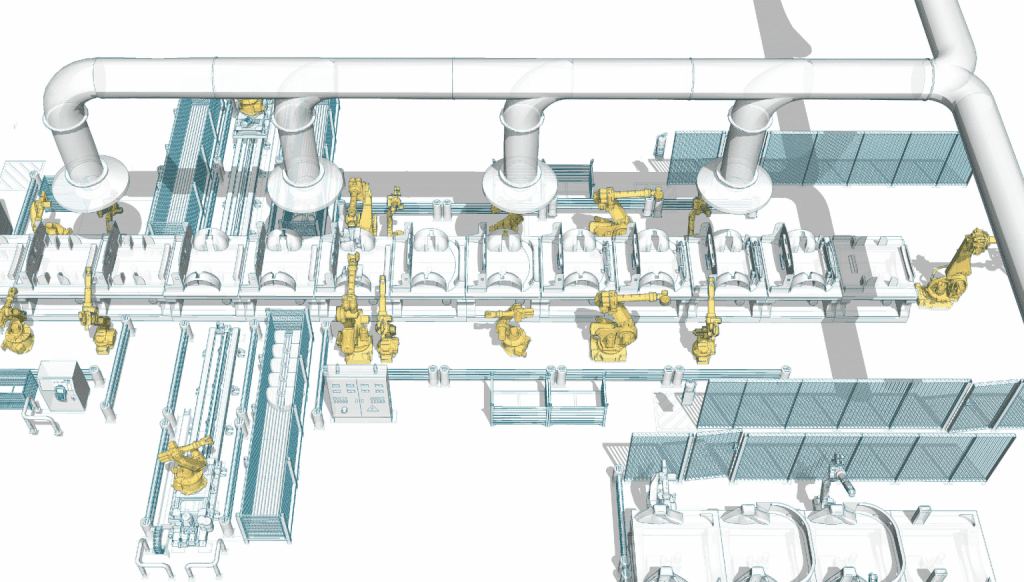
Progettazione di linee di produzione robotizzate
Utilizzare software di progettazione parametrica per soddisfare la progettazione di postazioni di lavoro con robot singoli e linee di produzione robotizzate.
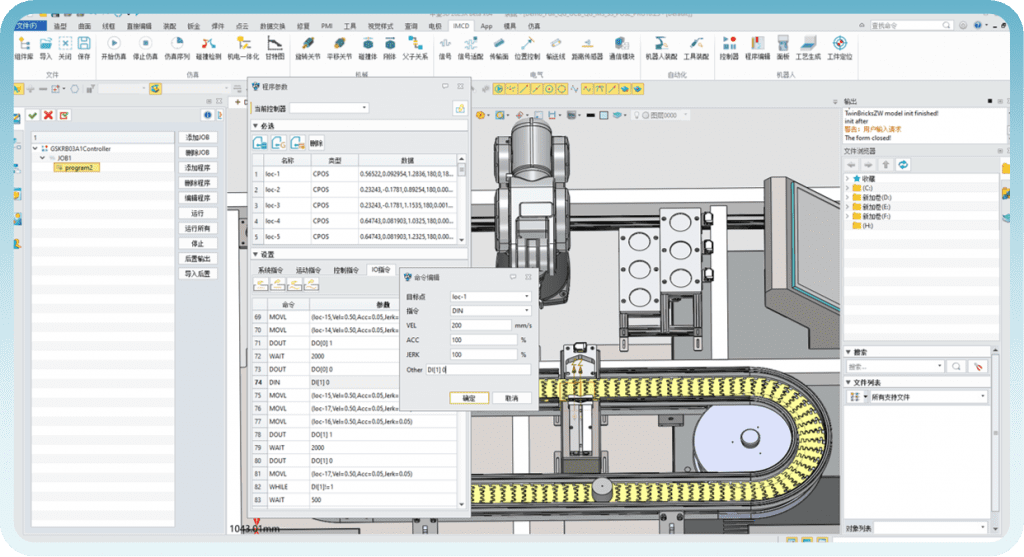
Programmazione offline del robot
Processo di programmazione dell’ufficio: Importazione del modello di robot -> Pianificazione del processo -> Simulazione del processo di lavorazione -> Ottimizzazione del sistema della postazione di lavoro -> Output del codice postale
Verifica della programmazione: supporta la decompilazione del programma robot, che può verificare e ottimizzare i programmi robot
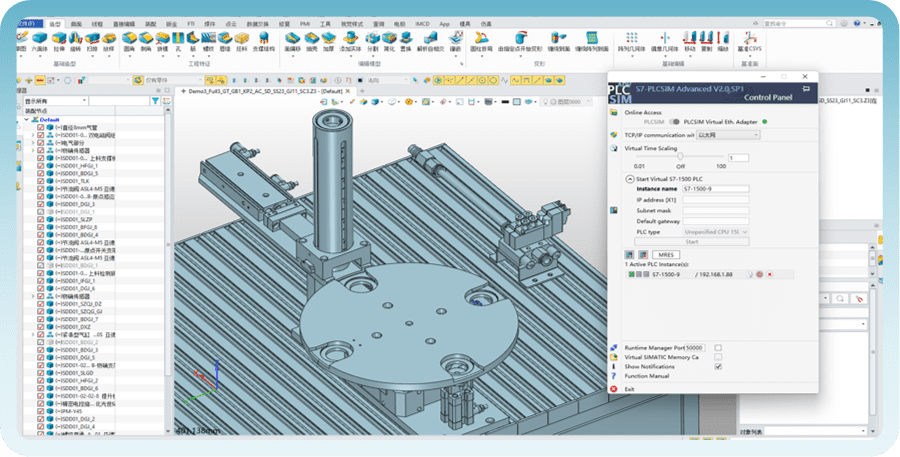
Messa in servizio virtuale del robot
Dotato di debug virtuale e monitoraggio virtuale, è possibile sincronizzare le azioni della postazione di lavoro del sistema robotico virtuale e della postazione di lavoro del sistema robotico reale;
Supporta la simulazione della comunicazione IO multi-macchina, la sincronizzazione multi-robot e la pianificazione del collegamento multi-asse dei robot.
Ulteriori informazioni sulle soluzioni di lavorazione robotica iRobotCAM